强化学习——DQN玩合成大西瓜¶
作者: 莱可可
日期: 2022.11
摘要: 使用 DQN 算法训练 AI 玩合成大西瓜
一、介绍¶
本案例展示了使用DQN玩合成大西瓜的一个实现。
Deep Q-Network (DQN 算法)¶
DQN 是基于深度学习的 Q 学习算法,主要结合了值函数近似和神经网络技术,并采用目标网络和经验回放的方法进行训练。
目标网络:使用一个固定的 Q 神经网络来计算目标值,这样可以减少训练时的波动。
经验回放:将经验存储在一个缓冲区中,然后从缓冲区中随机采样,这样可以减少相关性,使得训练更加稳定。
合成大西瓜 - 任务介绍¶
合成大西瓜玩法与《2048》《俄罗斯方块》类似,玩家每次可以从游戏画面顶部放下一个水果,玩家可以控制放下水果的横坐标。
游戏中共有11种水果,包括葡萄、樱桃等,最终目标是合成大西瓜。
每当两个相同类别的水果发生碰撞时,这两个水果将会合成为体积略大的新水果,例如两个葡萄碰撞将合成一个樱桃。
在本教程任务中,agent 需要学会将水果从合适的位置(横坐标)放下,使水果能顺利合成。
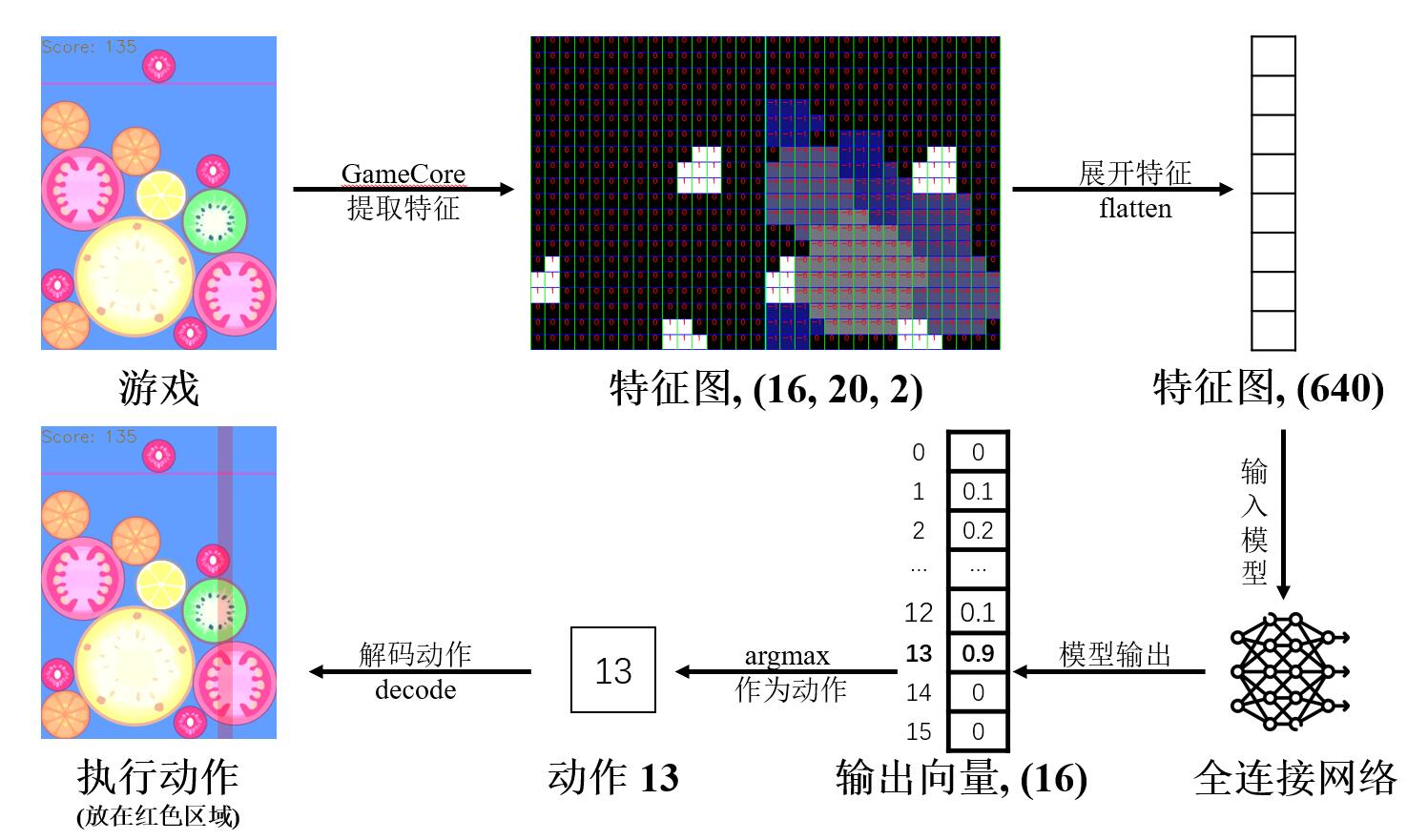
本教程的数据流方向如下所示(不含训练部分):
二、环境配置¶
本教程依赖的非 python 官方包如下:
pymunk: python 2D物理引擎,用于处理物体碰撞等运动
opencv-python: 图形库,用于绘制界面与交互
numpy: 数值计算库,主要用于图像处理和模型数据处理
%pip install paddlepaddle pymunk opencv-python numpy matplotlib
import random
import typing
import enum
import collections
from threading import Lock
import base64
import math
import datetime
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import pymunk
import cv2
import paddle
from paddle import nn
from paddle import optimizer
print(paddle.__version__)
2.3.2
三、实现游戏本体¶
3.1 事件系统¶
事件系统是对游戏与用户交互的抽象,包括鼠标点击与鼠标移动。
class EventType(enum.Enum):
# 左键单击
LBUTTONDOWN = (1,)
# 鼠标移动
MOUSEMOVE = (2,)
# 右键单击
RBUTTONDOWN = (3,)
class Event:
def __init__(self, type: EventType):
self.type = type
# 鼠标事件
class MouseEvent(Event):
def __init__(self, type: EventType, pos: typing.Tuple[int, int]):
self.pos = pos
super().__init__(type)
# 事件系统基类
class GameEventBase:
def __init__(self):
self.__events = []
# 添加一个事件
def add_event(self, event: Event):
self.__events.append(event)
# 获取(上一次获取之后)新发生的事件
# 该操作会清空现有事件列表
@property
def events(self) -> typing.List[Event]:
_events = self.__events[:]
self.__events.clear()
return _events
3.2 图像渲染¶
游戏的图形界面绘制需要一些辅助函数,如下:
mix: 将background和foreground基于透明度混合(并给foreground额外乘算alpha的透明度),直接在background上修改cover: 将foreground基于透明度覆盖到background上(并给foreground额外乘算alpha的透明度),直接在background上修改intersectRect: 计算两个矩形框(x, y, w, h)的相交矩形框(ix, iy, iw, ih)putText2: 在image上以center为中心,绘制文字text(用法同cv2.putText)putInverseColorText: 在image上基于pos点,调用putTextFunc绘制文字text,文字与image反色
# 将 background 和 foreground 基于透明度混合(并给 foreground 额外乘算 alpha 的透明度),直接在 background 上修改
def mix(background: np.ndarray, foreground: np.ndarray, alpha: float = 1.0) -> None:
alpha_back = background[:, :, 3] / 255.0
alpha_fore = (foreground[:, :, 3] / 255.0) * alpha
for c in range(3):
background[:, :, c] = np.ubyte(
alpha_fore * foreground[:, :, c]
+ alpha_back * background[:, :, c] * (1 - alpha_fore)
)
background[:, :, 3] = np.ubyte((1 - (1 - alpha_fore) * (1 - alpha_back)) * 255)
# 将 foreground 基于透明度覆盖到 background 上(并给 foreground 额外乘算 alpha 的透明度),直接在 background 上修改
def cover(background: np.ndarray, foreground: np.ndarray, alpha: float = 1.0) -> None:
foreground_colors = foreground[:, :, :3]
alpha_channel = (foreground[:, :, 3] / 255.0) * alpha
alpha_mask = np.dstack((alpha_channel, alpha_channel, alpha_channel))
background[:, :, :3] = (
background[:, :, :3] * (1 - alpha_mask) + foreground_colors * alpha_mask
)
# 计算两个矩形框 (x, y, w, h) 的相交矩形框 (ix, iy, iw, ih)
def intersectRect(rect1: typing.List[int], rect2: typing.List[int]) -> typing.List[int]:
l1, t1, b1, h1 = rect1
r1, b1 = l1 + b1, t1 + h1
l2, t2, b2, h2 = rect2
r2, b2 = l2 + b2, t2 + h2
l, r = max(l1, l2), min(r1, r2)
t, b = max(t1, t2), min(b1, b2)
return [l, t, max(0, r - l), max(0, b - t)]
# 在 image 上以 center 为中心,绘制文字 text (用法同 cv2.putText )
def putText2(
image: np.ndarray,
text: str,
center: typing.List[int],
font_face: int = 0,
font_scale: float = 1.0,
color: typing.List[int] = (255, 255, 255),
thickness: int = 1,
) -> None:
INNER_LINE_MARGIN = 5
x, y = center
lines = text.splitlines()
sizes = [
cv2.getTextSize(line, font_face, font_scale, thickness)[0] for line in lines
]
h_sum = sum([size[1] for size in sizes]) + (len(sizes) - 1) * INNER_LINE_MARGIN
w_max = max([size[0] for size in sizes])
y_base = y - h_sum // 2
for i, (w, h) in enumerate(sizes):
cv2.putText(
image,
lines[i],
(x - w // 2, y_base),
font_face,
font_scale,
color,
thickness,
)
y_base += h + INNER_LINE_MARGIN
# 在 image 上基于 pos 点,调用 putTextFunc 绘制文字 text,文字与 image 反色
def putInverseColorText(
image: np.ndarray,
text: str,
pos: typing.List[int],
font_face: int = 0,
font_scale: float = 1.0,
thickness: int = 1,
putTextFunc: typing.Callable = putText2,
) -> None:
mask = np.zeros((*image.shape[:2], 3), dtype=np.uint8)
putTextFunc(mask, text, pos, font_face, font_scale, (255, 255, 255), thickness)
image[:, :, :3] = mask + (2 * (0.5 - mask / 255.0)) * image[:, :, :3]
3.3 伪随机数生成器¶
自定义伪随机数生成器,使用二次同余生成器[1](quadratic congruential generator)算法,便于控制随机过程。
二次同余生成器的算法原理如下: $y_n = (a * y_{n-1}^2 + b *y_{n-1} + c) \mod p ,n > 0$
其中,$a$, $b$, $c$ 分别为二次项系数、一次项系数与常数项。
在本教程实现中,取 $a = 1, b = c = 0, p = p_1 * p_2$,则算法退化为 $y_n = y_{n-1}^2 \mod (p_1 * p_2) ,n > 0$
令 $p_1$、$p_2$ 为两个大质数,则生成的随机数周期会更大。
[1] Eichenauer, J., Lehn, J. On the structure of quadratic congruential sequences. Manuscripta Math 58, 129–140 (1987).
class PRNG:
def __init__(self):
self.s = 1234 # y_0,取为 1234
self.p = 999979 # p_1,第一个大质数
self.q = 999983 # p_2,第二个大质数
self.m = self.p * self.q # p,模数
# 基于 x 的哈希结果,获得一个浮点数
def hash(self, x: any) -> float:
y = base64.encodebytes(bytes(str(x).encode("utf8")))
z = 0
for i, v in enumerate(y):
z += v * math.pow(128, i)
return z
# 传入可哈希变量 seed,以此初始化 s (即 y_0)。
def seed(self, seed: any = datetime.datetime.now()):
y = 0
z = 0
while y % self.p == 0 or y % self.q == 0 or y == 0 or y == 1:
y = (self.hash(seed) + z) % self.m
z += 1
self.s = y # 初始化 y_0
# 跳过前 10 个随机数,用来混淆
[self.next() for _ in range(10)]
# 获取 [0, 1) 的随机浮点数
def next(self) -> float:
self.s = (self.s * self.s) % self.m
return self.s / self.m
# 获取 [l = 0, r = 1) 的随机浮点数
def random(self, l: float = 0, r: float = 1) -> float:
return self.next() * (r - l) + l
# 获取 [l = 0, r = 2) 的随机整数
def randint(self, l: int = 0, r: int = 2) -> int:
return int(math.ceil(self.random(l, r)))
3.4 实现水果类¶
3.4.1 水果参数¶
定义各种水果的半径、尺寸与对应图片。
(列表中首个元素无意义,用于占位 type 0)
# 水果半径 r
FRUIT_RADIUS = [int(1.5 * r) for r in [-1, 10, 15, 21, 23, 29, 35, 37, 50, 59, 60, 78]]
# 水果尺寸 (w, h)
FRUIT_SIZES = [(2 * r, 2 * r) for r in FRUIT_RADIUS]
# 水果图像路径
FRUIT_IMAGE_PATHS = [f"resources/images/{i:02d}.png" for i in range(11)]
# 水果图像原图 (np.ndarray)
FRUIT_RAW_IMAGES = [
cv2.imread(FRUIT_IMAGE_PATHS[i], -1) if i > 0 else None for i in range(11)
]
# 水果基于尺寸缩放后的图像 (np.ndarray)
FRUIT_IMAGES = [
None if img is None else cv2.resize(img, FRUIT_SIZES[i])
for i, img in enumerate(FRUIT_RAW_IMAGES)
]
3.4.2 水果类定义¶
定义所有水果的类 class Fruit。
每个水果对应一个该类型实例,主要用于描述水果对象的位置。
其中,水果的种类 type 为 $[1, 11]$,其中 $1$ 是葡萄,$11$ 是大西瓜。
合成得分:
当两个种类为 $x$ 的水果碰撞时,合成出一个种类为 $x+1$ 的新水果,并在游戏中获得 $x+1$ 分;
特别的,当 $x=10$ 时,合成出的新水果为 $11$ (大西瓜),并在游戏中获得 $100$ 分。
class Fruit:
# 初始化时,传入水果种类 type 与水果位置 (x, y)
def __init__(self, type: int, x: int, y: int) -> None:
self.type = type
self.r = FRUIT_RADIUS[self.type]
self.size = FRUIT_SIZES[self.type]
self.x, self.y = x, y
# 更新水果位置
def update_position(self, x: int, y: int) -> None:
self.x, self.y = x, y
# 在 screen 上绘制水果图像
def draw(self, screen: np.ndarray) -> None:
Fruit.paint(screen, self.type, self.x, self.y)
# Fruit.paint,绘制水果图像
def paint(
screen: np.ndarray, type: int, x: int, y: int, alpha: float = 1.0
) -> None:
assert type > 0 and type <= 11
l, t = (x - FRUIT_RADIUS[type], y - FRUIT_RADIUS[type])
w, h = FRUIT_SIZES[type]
l, t, w, h = [int(v) for v in (l, t, w, h)]
# 计算实际绘图区域
il, it, iw, ih = [
int(v) for v in intersectRect((l, t, w, h), (0, 0, *screen.shape[1::-1]))
]
cover(
screen[it : it + ih, il : il + iw],
FRUIT_IMAGES[type][it - t : it - t + ih, il - l : il - l + iw],
alpha=alpha,
)
3.5 游戏本体¶
# 物理引擎重力
GRAVITY = (0, 800)
# 游戏场景大小
GAME_RESOLUTION = GAME_WIDTH, GAME_HEIGHT = 300, 400
设置背景色为 rgb(0x41, 0x69, 0xE1) ████████
class GameCore(GameEventBase):
def __init__(self, gravity: typing.Tuple[int, int] = GRAVITY) -> None:
# 初始化游戏场景分辨率 resolution 与游戏场景宽高 width, height
# 其中 resolution = (width, height)
self.resolution = self.width, self.height = GAME_WIDTH, GAME_HEIGHT
# 水果落下时的初始 x、y 坐标
self.init_x = int(self.width / 2)
self.init_y = int(0.15 * self.height)
# 本局游戏已获得的分数
self.score = 0
# 最近一次合成的分数增量
self.recent_score_delta = 0
# 水果列表,每个元素为 Fruit 类型
self.fruits: typing.List[Fruit] = []
# 碰撞球列表,每个元素为 Circle 类型
self.balls: typing.List[pymunk.Shape] = []
# 游戏背景色 rgb(0xE1, 0x69, 0x41)
self.background_color = (0xE1, 0x69, 0x41, 0)
# 预渲染纯色背景图
self.preset_background = np.zeros((self.height, self.width, 4), dtype=np.uint8)
self.preset_background[:, :] = self.background_color
# 预渲染带红线的纯色背景图(红色警戒线,游戏失败的检查线)
self.preset_redline_screen = self.preset_background.copy()
cv2.line(
self.preset_redline_screen,
(0, self.init_y),
(self.width, self.init_y),
(0, 0, 255),
2,
)
# 基于纯色背景图初始化游戏画面
self.__screen = self.preset_background.copy()
# 逻辑互斥锁
self.lock = Lock()
# 渲染互斥锁
self.render_lock = Lock()
# 伪随机数生成器
self.prng = PRNG()
# 稳定帧数阈值,当持续 10 帧稳定时,视为稳定状态
# 用来避免不稳定的平衡态
self.stable_frame_threshold = 10
# 当前帧 id
self.current_frame_id = 0
# 上一稳定状态的帧 id
self.stable_frame_id = self.current_frame_id - self.stable_frame_threshold
# 游戏是否可操作(可以点击)
self.clickable = False
# 目前已经合成过的最大水果 type (用于生成新水果)
self.largest_fruit_type = 1
# 当前要放下的水果 type
self.current_fruit_type = self.create_random_fruit_type()
# 初始化物理空间与重力
self.space = pymunk.Space()
self.space.gravity = gravity
# 重置游戏状态
self.reset()
# 初始化物理边界
self.init_segment()
# 设置碰撞处理函数
self.setup_collision_handler()
super().__init__()
# 重启游戏,可指定随机数种子(影响生成水果的种类)
def reset(self, seed: int = None) -> None:
for ball in self.balls:
self.space.remove(ball, ball.body)
self.score = 0
self.fruits.clear()
self.balls.clear()
self.current_frame_id = 0
self.stable_frame_id = self.current_frame_id - self.stable_frame_threshold
self.prev_stable_frame_id = self.stable_frame_id
self.clickable = False
self.largest_fruit_type = 1
self.current_fruit_type = self.create_random_fruit_type()
# 如果传入了 seed,则使用 seed 初始化,否则随机初始化
self.prng.seed(**({} if seed is None else {"seed": seed}))
self.alive = True
# 初始化游戏场景边界(物理引擎)
def init_segment(self, thinkness: float = 20, friction: float = 0.6):
# 四边界分别向外 thinkness 个像素
l, t = 0 - thinkness, 0 - thinkness - self.height // 2
r, b = self.width + thinkness, self.height + thinkness
def create_segment(
p1: typing.Tuple[int, int], p2: typing.Tuple[int, int]
) -> pymunk.Segment:
s = pymunk.Segment(self.space.static_body, p1, p2, thinkness)
s.friction = friction
return s
self.space.add(create_segment((l, t), (l, b))) # 添加左边界
self.space.add(create_segment((r, t), (r, b))) # 添加右边界
# 不添加顶部边界
# self.space.add(create_segment((l, t), (r, t)))
self.space.add(create_segment((l, b), (r, b))) # 添加下边界
# 设置碰撞处理器(物理引擎)
def setup_collision_handler(self):
def collision_post_solve(arbiter: pymunk.Arbiter, space: pymunk.Space, _data):
# 获取逻辑互斥锁
with self.lock:
# 获取碰撞物体 s_0, s_1
s0, s1 = arbiter.shapes[:2]
# 要生成的物体类型为 type + 1 (碰撞对象类型为 type)
new_type = s0.collision_type + 1
x1, y1 = s0.body.position
x2, y2 = s1.body.position
# 新物体的坐标为碰撞两物体中,坐标更靠下的物体
x, y = (x1, y1) if y1 > y2 else (x2, y2)
# 删除这两个碰撞球
if s0 in self.balls and s1 in self.balls:
self.remove_ball(space, s0)
self.remove_ball(space, s1)
# 创建新水果
fruit = Fruit(new_type, x, self.init_y)
self.fruits.append(fruit)
# 创建新水果的碰撞球
ball = self.create_ball(
self.space, x, y, fruit.r // 10, fruit.r - 1, new_type
)
self.balls.append(ball)
# 更新最大水果类型
self.largest_fruit_type = max(self.largest_fruit_type, new_type)
# 记录本次分数增量
self.recent_score_delta = new_type if new_type < 11 else 100
# 更新分数
self.score += self.recent_score_delta
for collision_type in range(1, 11):
self.space.add_collision_handler(
collision_type, collision_type
).post_solve = collision_post_solve
# 创建随机水果种类
def create_random_fruit_type(self) -> int:
return self.prng.randint(1, min(self.largest_fruit_type, 5))
# 创建水果(逻辑)
def create_fruit(self, type: int, x: int) -> Fruit:
return Fruit(type, x, self.init_y - FRUIT_RADIUS[type])
# 创建水果碰撞球(物理引擎)
def create_ball(
self,
space: pymunk.Space,
x: int,
y: int,
mass: int = 1,
radius: int = 7,
type: int = 1,
) -> pymunk.Shape:
ball_moment = pymunk.moment_for_circle(mass, 0, radius)
ball_body = pymunk.Body(mass, ball_moment)
ball_body.position = x, y
ball_shape = pymunk.Circle(ball_body, radius)
ball_shape.elasticity = 0.3
ball_shape.friction = 0.6
ball_shape.collision_type = type
space.add(ball_body, ball_shape)
return ball_shape
# 移除水果碰撞球(物理引擎)
def remove_ball(self, space: pymunk.Space, ball: pymunk.Circle):
p = self.balls.index(ball)
space.remove(ball, ball.body)
self.balls.pop(p)
self.fruits.pop(p)
# 保存游戏截图
def save_screen(self, path: str = "screenshot.png") -> bool:
rgb_img = cv2.cvtColor(self.screen, cv2.COLOR_BGRA2BGR)
return cv2.imwrite(path, rgb_img)
# 绘制游戏界面
def draw(self):
# 双缓冲层,减少对渲染互斥锁的占用
backbuffer = self.preset_background.copy()
# 绘制半透明的待放置水果
if self.current_fruit_type > 0:
y = self.init_y - FRUIT_RADIUS[self.current_fruit_type]
Fruit.paint(
backbuffer,
self.current_fruit_type,
self.init_x,
y,
1 if self.clickable else 0.5,
)
# 绘制场地中的水果
for f in self.fruits:
f.draw(backbuffer)
# 与红线背景层合成
cv2.addWeighted(backbuffer, 1, self.preset_redline_screen, 0.5, 0, backbuffer)
# 绘制分数文本
putInverseColorText(
backbuffer,
f"Score: {self.score}",
(0, 20),
font_scale=0.7,
thickness=1,
putTextFunc=cv2.putText,
)
# 如果已经死亡,绘制死亡文本
if not self.alive:
putInverseColorText(
backbuffer,
f"Failed\nClick RButton to Restart",
(int(self.width / 2), int(self.height / 2)),
font_scale=0.7,
thickness=2,
)
# 获得渲染锁,更新画面
with self.render_lock:
self.__screen[:, :, :] = backbuffer
return self.__screen
# 获取游戏界面
@property
def screen(self) -> np.ndarray:
with self.render_lock:
return self.__screen
# 获取特征
def get_features(self, width: int, height: int) -> np.ndarray:
"""
参数:
- width: 网格宽度
- height: 网格高度
return:
- features: (height, width, 2) np.ndarray
- features[:, :, 0]: 用于记录比当前水果小的水果
- features[:, :, 1]: 用于记录比当前水果大的水果
"""
# 计算网格单元宽高
uw, uh = self.width / width, self.height / height
features = np.zeros((height, width, 2), dtype=np.float32)
# 辅助矩阵,分别记录 type (网格水果类型), dr(最小距离)
auxilary = np.zeros((height, width, 2), dtype=np.float32)
auxilary[:, :, 1] = np.inf
# 更新阈值,距离 dr 大于该阈值的视为不在网格内
threshold = ((uw**2) + (uh**2)) // 2
for f in self.fruits:
r2 = f.r * f.r
for j in range(width):
x = (0.5 + j) * uw
for i in range(height):
y = (0.5 + i) * uh
# 计算横纵坐标差
dx, dy = f.x - x, f.y - y
# dr = np.sqrt(dx * dx + dy * dy) - f.r
# 使用平方和代替开方,提高运算速度
dr = dx * dx + dy * dy - r2
# 如果 dr 小于阈值且小于目前的最小 dr,更新网格内水果信息
if dr < threshold and dr < auxilary[i, j, 1]:
auxilary[i, j, 0] = f.type
auxilary[i, j, 1] = dr
# 是否为空 (True 或 False)
is_empty = auxilary[:, :, 0] == 0
# 是否和当前水果类型相同 (True 或 False)
is_same = auxilary[:, :, 0] == self.current_fruit_type
# 网格内水果类型 (type_1) ,当前水果 (type_0)
# 如果 type_1 < type_0,则值为 type_1 - type_0
# 如果 type_1 == type_0,则值为 1
# 如果 type_1 > type_0,则值为 0
# 如果 type_1 == 0 (网格为空),则值为 0
features[:, :, 0] = auxilary[:, :, 0] - self.current_fruit_type
features[:, :, 0] = features[:, :, 0].clip(max=0)
features[:, :, 0][is_same] = 1
features[:, :, 0][is_empty] = 0
# 网格内水果类型 (type_1) ,当前水果 (type_0)
# 如果 type_1 > type_0,则值为 type_0 - type_1
# 如果 type_1 == type_0,则值为 1
# 如果 type_1 < type_0,则值为 0
# 如果 type_1 == 0 (网格为空),则值为 0
features[:, :, 1] = self.current_fruit_type - auxilary[:, :, 0]
features[:, :, 1] = features[:, :, 1].clip(max=0)
features[:, :, 1][is_same] = 1
features[:, :, 1][is_empty] = 0
return features
# 更新游戏至稳定状态(可以进行下一动作)
def update_until_stable(self, fps: float = 60, max_seconds: int = 5):
self.set_unstable()
max_steps = int(fps * max_seconds)
step = 0
while (
self.current_frame_id <= self.stable_frame_id + self.stable_frame_threshold
and step < max_steps
):
self.update(1.0 / fps)
step += 1
# 当超过 max_steps 步仍未稳定时,强制设置为稳定(可操作)
if step == max_steps:
self.clickable = True
# 更新游戏(一帧)
def update(self, time_delta: float):
self.current_frame_id += 1
# 物理引擎单步模拟
self.space.step(time_delta)
# 检查稳定状态
stable = self.check_stable()
if not stable:
self.set_unstable()
# 检查是否失败
self.alive = self.alive and self.check_alive()
# 如果已经失败,则不再进行更新,并等待右键重启游戏
if not self.alive:
for event in self.events:
if event.type == EventType.RBUTTONDOWN:
self.reset()
break
return
# 如果已经稳定了足够多 (stable_frame_threshold == 10) 帧并不能进行操作,则设置为可操作
if (
not self.clickable
and self.current_frame_id
> self.stable_frame_id + self.stable_frame_threshold
):
self.prev_stable_frame_id = self.stable_frame_id
self.clickable = True
# 处理事件
for event in self.events:
# 左键单击,放下当前水果
if event.type == EventType.LBUTTONDOWN and self.clickable:
# 放下位置为 (x, init_y - fruit.r)
# 即圆心横坐标为鼠标横坐标,圆下边界与红线相切
x, _y = event.pos
fruit = self.create_fruit(self.current_fruit_type, x)
self.fruits.append(fruit)
y = self.init_y - fruit.r
ball = self.create_ball(
self.space,
x,
y,
(fruit.r // 10) ** 2,
fruit.r - 1,
self.current_fruit_type,
)
self.balls.append(ball)
# 创建新水果
self.current_fruit_type = self.create_random_fruit_type()
self.set_unstable()
self.clickable = False
# 鼠标移动时,移动当前水果
elif event.type == EventType.MOUSEMOVE:
self.init_x, _y = event.pos
self.init_x = max(
self.init_x, 0 + FRUIT_RADIUS[self.current_fruit_type]
)
self.init_x = min(
self.init_x, self.width - FRUIT_RADIUS[self.current_fruit_type]
)
assert not self.lock.locked()
# 获取逻辑锁,更新所有水果
with self.lock:
for i, ball in enumerate(self.balls):
x, y = ball.body.position
angle = ball.body.angle
# xi, yi = int(x), int(y)
self.fruits[i].update_position(x, y)
# 重置稳定状态(设置为不稳定)
def set_unstable(self) -> None:
self.stable_frame_id = self.current_frame_id + 1
# 检查游戏场景是否稳定
def check_stable(self) -> bool:
return self.max_balls_velocity_y < 20
# 获取碰撞球竖直方向速度绝对值的最大值
@property
def max_balls_velocity_y(self) -> float:
return (
max([abs(ball.body.velocity.y) for ball in self.balls])
if len(self.balls) > 0
else 0
)
# 检查游戏是否仍在进行
def check_alive(self) -> bool:
if self.current_frame_id > self.stable_frame_id + self.stable_frame_threshold:
for f in self.fruits:
if f.y < self.init_y:
return False
return True
# 左键单击事件,用于放下水果
def click(self, pos: typing.Tuple[int, int]):
self.add_event(MouseEvent(EventType.LBUTTONDOWN, pos))
# 鼠标移动,用于可视化界面中的水果跟随鼠标
def move(self, pos: typing.Tuple[int, int]):
self.add_event(MouseEvent(EventType.MOUSEMOVE, pos))
# 右键单击事件,用于重启游戏
def rclick(self, pos: typing.Tuple[int, int]):
self.add_event(MouseEvent(EventType.RBUTTONDOWN, pos))
3.6 游戏接口¶
封装接口,提供强化学习环境。
提供以下接口:
reset: 重启游戏simulate_until_stable: 运行游戏,直到游戏结束或者可以进行下一次操作next: 输入 $action$,进行一次模拟,并返回 $(feature, reward, alive)$ 三元组
其中,$reward$ 定义为,一次动作 $action$ 后,能带来的 $score$ 提升。
特别的,当 $score$ 未改变时,该动作由于减少了空间,其 $reward$ 设置为负数 $-fruit.type$ (记本次动作放下的水果为 $fruit$) 。
定义模拟时,每秒帧数为 $SIMULATE_FPS = 60$ 帧;可进行的动作种类为 $ACTION_NUM = 16$ 种(在16个均匀分布的水平坐标处放下水果)。
例如,当 $action = 13$ 时,下一个水果将从从红色区域正中间放下。
红色区域左右边界为 $(width / ACTION_NUM * 13, width / ACTION_NUM * (13 + 1))$。
由于 $width = 300$,每个 action 的区域宽度为 $width / ACTION_NUM = 300 / 16 = 18.75$,左右边界为 $(243.75, 262.5)$。
放下水果的位置为 $x = int(13.5 * 18.75) = int(253.125) = 253$。
class GameInterface:
# 可选的动作数量
ACTION_NUM = 16
# 每秒的帧率
SIMULATE_FPS = 60
# 特征图尺寸
FEATURE_MAP_WIDTH, FEATURE_MAP_HEIGHT = 16, 20
def __init__(self) -> None:
self.game = GameCore()
self.action_num = GameInterface.ACTION_NUM
# 每个红色区域的宽度
self.action_segment_len = self.game.width / GameInterface.ACTION_NUM
def reset(self, seed: int = None) -> None:
self.game.reset(seed)
# 模拟至稳定状态
def simulate_until_stable(self) -> None:
self.game.update_until_stable(GameInterface.SIMULATE_FPS)
# 将 action 解析成放置坐标(其中 y 无意义)
def decode_action(self, action: int) -> typing.Tuple[int, int]:
x = int((action + 0.5) * self.action_segment_len)
return (x, 0)
# 输入一个 action,进行模拟,并获得特征三元组
def next(self, action: int) -> typing.Tuple[np.ndarray, int, bool]:
current_fruit = self.game.current_fruit_type
score_1 = self.game.score
self.game.click(self.decode_action(action))
self.simulate_until_stable()
feature = self.game.get_features(
GameInterface.FEATURE_MAP_WIDTH, GameInterface.FEATURE_MAP_HEIGHT
)
score_2 = self.game.score
score, reward, alive = self.game.score, score_2 - score_1, self.game.alive
reward = reward if reward > 0 else -current_fruit
flatten_feature = feature.flatten().astype(np.float32)
return flatten_feature, reward, alive
四、实现智能体与经验池¶
4.1 构建网络¶
定义函数 build_model,调用后获得构建的全连接网络。
该网络含有三个全连接层,每层 64 个节点,并采用 ReLU 进行激活。
def build_model(input_size: int, output_size: int) -> nn.Layer:
model_prototype = nn.Sequential(
nn.Linear(in_features=input_size, out_features=64), # 全连接层
nn.ReLU(),
nn.Linear(in_features=64, out_features=64), # 全连接层
nn.ReLU(),
nn.Linear(in_features=64, out_features=64), # 全连接层
nn.ReLU(),
nn.Linear(in_features=64, out_features=output_size), # 输出层
)
return model_prototype
4.2 构建经验池¶
经验池可以用来持久化 $experience$ (经验),并消除各个 $experience$ 之间的相关性。
每个 $experience$ 主要用于记录 $state$ (状态)、$action$ (动作) 和 $reward$ (奖励)的关联,在强化学习中,通常使用 $(state, action, new_state, reward)$ ,以表示状态转移与动作、奖励的关联。
在该项目中,使用 $feature$ 表示 $state$,并加入 $alive$ (存活与否)表示游戏状态。
$experience$ 的结构包括以下部分:
$feature$: 动作前的状态(特征)
$action$: 进行的动作
$reward$: 动作获得的奖励
$next_feature$: 动作后的状态(特征)
$alive$: 游戏是否仍能进行
# 经验池容量
MEMORY_SIZE = 50000
# 经验池中的最小样本数
MEMORY_WARMUP_SIZE = 5000
class ReplayMemory(collections.deque):
def __init__(self, max_size: int = MEMORY_SIZE) -> None:
super().__init__(maxlen=max_size)
def sample(
self, batch_size: int
) -> typing.Tuple[np.ndarray, np.ndarray, np.ndarray, np.ndarray, np.ndarray]:
mini_batch = random.sample(self, batch_size)
# feature_batch, action_batch, reward_batch, next_feature_batch, alive_batch = experiences
experiences = list(zip(*mini_batch))
return tuple([np.array(exp) for exp in experiences])
4.3 构建 Agent¶
4.3.1 定义 Agent 超参数¶
# 学习率
LEARNING_RATE = 0.001
# 折扣因子
GAMMA = 0.99
4.3.2 构建随机 Agent¶
构建一个随机动作的 Agent 作为 baseline,用于效果检验。
class RandomAgent:
def __init__(self, action_num: int) -> None:
self.action_num = action_num
# 随机选择一个动作
def sample(self, _feature: np.ndarray) -> np.ndarray:
return self.predict(_feature)
# 随机选择一个动作
def predict(self, feature: np.ndarray) -> np.ndarray:
return np.random.randint(0, self.action_num, size=(1))
4.3.3 构建DQN Agent¶
DQN 使用两个结构相同、参数不同的神经网络来训练,$policy_net$ 用于学习,每次训练都更新,而 $target_net$ 在训练过程中比较固定,定期更新,负责产生目标。
优化目标为 $Q^\pi(s_t, a_t) = r_t + Q^\pi(s_{t+1}, \pi(s_{t+1}))$。
其中,左侧 $Q^\pi(s_t, a_t)$ 为模型输出,即 $policy_net$, 右侧 $r_t + Q^\pi(s_{t+1}, \pi(s_{t+1}))$ 则为目标 $target$,即 $target_net$。
class Agent:
def __init__(
self,
build_model: typing.Callable,
feature_dim: int,
action_num: int,
e_greed: float = 0.1,
e_greed_decrement: float = 1e-6,
learning_rate: float = LEARNING_RATE,
loss_func: typing.Callable[
[paddle.Tensor, paddle.Tensor], paddle.Tensor
] = nn.MSELoss("mean"),
) -> None:
self.policy_net = build_model(feature_dim, action_num)
self.target_net = build_model(feature_dim, action_num)
# 特征维度(输入向量维度)
self.feature_dim = feature_dim
# 可选动作数量(输出向量维度)
self.action_num = action_num
# e-greedy 策略的 e-greed
self.e_greed = e_greed
self.e_greed_decrement = e_greed_decrement
# 损失函数与优化器
self.loss_func = loss_func
self.optimizer = optimizer.Adam(
parameters=self.policy_net.parameters(), learning_rate=learning_rate
)
# 当前步数
self.global_step = 0
# 每 update_target_steps (200) 步进行 target_net 的更新
self.update_target_steps = 200
# 基于 e_greed 策略,随机选择一个动作或基于当前模型选择一个动作
def sample(self, feature: np.ndarray) -> np.ndarray:
if np.random.uniform() < self.e_greed:
action = np.random.randint(0, self.action_num, size=(1))
else:
action = self.predict(feature)
self.e_greed = max(0, self.e_greed - self.e_greed_decrement)
return action
# 基于当前模型选择一个动作
def predict(self, feature: np.ndarray) -> np.ndarray:
with paddle.no_grad():
action = self.policy_net(paddle.to_tensor(feature)).argmax()
return action.numpy()
# 学习,更新 policy_net,并根据 global_step 决定是否更新 target_net
def learn(
self,
feature: np.ndarray,
action: int,
reward: float,
next_feature: np.ndarray,
alive: bool,
):
# 更新 target_net
if self.global_step % self.update_target_steps == 0:
self.target_net.load_dict(self.policy_net.state_dict())
pass
self.global_step += 1
feature_batch = paddle.to_tensor(feature, dtype="float32")
action_batch = paddle.to_tensor(action, dtype="int32")
reward_batch = paddle.to_tensor(reward, dtype="float32")
next_feature_batch = paddle.to_tensor(next_feature, dtype="float32")
alive_batch = paddle.to_tensor(alive, dtype="float32")
output_policy = paddle.squeeze(self.policy_net(feature_batch))
action_batch = paddle.squeeze(action_batch)
action_batch_onehot = nn.functional.one_hot(action_batch, self.action_num)
# policy_net 的输出与 action_batch_onehot 点乘,得到 q 值 policy_q_value
policy_q_value = paddle.sum(
paddle.multiply(output_policy, action_batch_onehot), axis=1
)
with paddle.no_grad():
# 计算 target_net 的输出 output_target_next
output_target_next = paddle.squeeze(self.target_net(next_feature_batch))
# 计算 target_next_q_value (action)
target_next_q_value = paddle.max(output_target_next, axis=1)
# 计算 target_q_value
target_q_value = paddle.squeeze(reward_batch) + GAMMA * paddle.squeeze(
target_next_q_value
) * paddle.squeeze(alive_batch)
# 计算损失
loss = self.loss_func(policy_q_value, target_q_value)
# 反向传播损失用于优化
self.optimizer.clear_grad()
loss.backward()
self.optimizer.step()
return loss.item()
五、实现训练方法¶
5.1 定义训练超参数¶
LEARN_FREQUENCY = 1 # 每 LEARN_FREQUENCY (1) 步学习一次
BATCH_SIZE = 32 # 每次学习的 batch 大小
5.2 运行一局¶
基于传入的 env (游戏环境)、agent (智能体) 进行一局游戏,直至游戏结束。
def run_episode(
env: GameInterface, agent: Agent, memory: ReplayMemory, episode_id: int, debug=False
):
# 初始化环境
env.reset()
step, rewards_sum = 0, 0
# 随机选择第一个动作
action = np.random.randint(0, env.action_num)
# 执行第一个动作,开始模拟以获取特征
feature, _, alive = env.next(action)
assert alive
while alive:
step += 1
# 获取 action
action = agent.sample(feature)
# 执行 action,获取下一个状态
next_feature, reward, alive = env.next(action)
# 如果动作导致游戏结束,则 reward 设为 -1000
reward = reward if alive else -1000
# 记录到经验池中
memory.append((feature, action, reward, next_feature, alive))
# 当经验池中的数据量不小于 MEMORY_WARMUP_SIZE 时,开始学习
# 由于 LEARN_FREQUENCY = 1,所以每步都学习
if (
len(memory) >= MEMORY_WARMUP_SIZE
and agent.global_step % LEARN_FREQUENCY == 0
):
(
feature_batch,
action_batch,
reward_batch,
next_feature_batch,
alive_batch,
) = memory.sample(BATCH_SIZE)
_loss = agent.learn(
feature_batch,
action_batch,
reward_batch,
next_feature_batch,
alive_batch,
)
reward_sum = np.sum(reward)
# reward 和加上本次的 reward
rewards_sum += reward_sum
feature = next_feature
# 返回本局游戏的总 reward
return rewards_sum
六、开始训练¶
6.1 初始化训练环境¶
# 特征图的维度(宽、高)
feature_map_height = GameInterface.FEATURE_MAP_HEIGHT
feature_map_width = GameInterface.FEATURE_MAP_WIDTH
# 动作数量
action_dim = GameInterface.ACTION_NUM
# 输入特征维度
feature_dim = feature_map_height * feature_map_width * 2
# e-greed 的初始值
e_greed = 0.5
# e-greed 的衰减量
e_greed_decrement = 1e-6
# 创建环境
env = GameInterface()
# 创建经验池
memory = ReplayMemory(MEMORY_SIZE)
# 创建智能体
agent = Agent(build_model, feature_dim, action_dim, e_greed, e_greed_decrement)
FINAL_PARAM_PATH = "final.pdparams" # 模型保存路径
6.2 尝试加载已有模型¶
本次演示时,不使用预训练权重。
# if os.path.exists(FINAL_PARAM_PATH):
# print("Load final param.")
# agent.policy_net.set_state_dict(paddle.load(FINAL_PARAM_PATH))
6.3 预热经验池¶
先在经验池中填充经验,避免前期训练时选取经验相关度过高。
print("Warm up.")
while len(memory) < MEMORY_WARMUP_SIZE:
run_episode(env, agent, memory, -1)
print(f"Memory size is {len(memory)}.")
Warm up.
Memory size is 5007.
6.4 创建评价函数¶
6.4.1 评价函数¶
传入环境和随机数种子,返回游戏得分与总奖励。
def evaluate(
env: GameInterface, agent: Agent, seed: int = None
) -> typing.Tuple[float, float]:
env.reset(seed) # 基于 seed 初始化环境
action = np.random.randint(0, env.action_num) # 选择随机动作
feature, _, alive = env.next(action) # 执行动作,获取特征
rewards_sum = 0
while alive:
action = agent.predict(feature)
feature, reward, alive = env.next(action)
reward_sum = np.sum(reward)
# 计算 reward 和
rewards_sum += reward_sum
# 返回本局游戏分数 score 和奖励 reward
return env.game.score, rewards_sum
6.4.2 与随机智能体对比¶
进行一定轮次的游戏,并比较双方的平均得分。
# 初始化用于评估的伪随机数生成器
evaluate_random = PRNG()
evaluate_random.seed("RedContritio")
# 进行 50 局游戏,对分数、奖励取平均,降低偶然性
EVALUATE_TIMES = 50
# 与随机智能体对比
def compare_with_random(env: GameInterface, agent: Agent, action_count: int) -> None:
random_agent = RandomAgent(action_count)
scores1, rewards1 = [], []
scores2, rewards2 = [], []
for _ in range(EVALUATE_TIMES):
# 选择环境初始化的随机数种子
seed = evaluate_random.random()
# 评估 DQN 智能体
score1, reward1 = evaluate(env, agent, seed)
scores1.append(score1)
rewards1.append(reward1)
# 评估随机智能体
score2, reward2 = evaluate(env, random_agent, seed)
scores2.append(score2)
rewards2.append(reward2)
print(
f"[DQN Agent]\t:\tmean_score: {np.mean(scores1)},\tmean_reward: {np.mean(rewards1)}"
)
print(
f"[Random Agent]\t:\tmean_score: {np.mean(scores2)},\tmean_reward: {np.mean(rewards2)}"
)
return [np.mean(scores1), np.mean(rewards1)], [np.mean(scores2), np.mean(rewards2)]
6.5 训练模型¶
进行 2000 局训练,每训练 200 局进行一次评价。特别的,在开始训练前进行一次评价。
max_episode = 2000
episode_per_save = max_episode // 10
# 记录 DQN 智能体和随机智能体的表现
history1, history2 = [], []
# 记录横坐标(局数)
x_history = []
print("Start training.")
for episode_id in range(0, max_episode + 1):
total_reward = run_episode(env, agent, memory, episode_id)
if episode_id % episode_per_save == 0:
print(f"Episode: {episode_id}, e_greed: {agent.e_greed}")
his1, his2 = compare_with_random(env, agent, action_dim)
history1.append(his1)
history2.append(his2)
x_history.append(episode_id)
Start training.
Episode: 0, e_greed: 0.49495300000013503
[DQN Agent] : mean_score: 76.34, mean_reward: 22.24
[Random Agent] : mean_score: 150.04, mean_reward: 68.12
Episode: 200, e_greed: 0.4856550000003838
[DQN Agent] : mean_score: 165.44, mean_reward: 83.56
[Random Agent] : mean_score: 167.26, mean_reward: 80.94
Episode: 400, e_greed: 0.4763610000006325
[DQN Agent] : mean_score: 192.22, mean_reward: 100.96
[Random Agent] : mean_score: 153.32, mean_reward: 66.52
Episode: 600, e_greed: 0.46702500000088226
[DQN Agent] : mean_score: 197.26, mean_reward: 105.44
[Random Agent] : mean_score: 160.68, mean_reward: 72.7
Episode: 800, e_greed: 0.45757400000113513
[DQN Agent] : mean_score: 183.18, mean_reward: 91.92
[Random Agent] : mean_score: 163.68, mean_reward: 77.58
Episode: 1000, e_greed: 0.4481560000013871
[DQN Agent] : mean_score: 189.1, mean_reward: 99.46
[Random Agent] : mean_score: 153.24, mean_reward: 70.5
Episode: 1200, e_greed: 0.4386110000016425
[DQN Agent] : mean_score: 199.06, mean_reward: 104.68
[Random Agent] : mean_score: 149.84, mean_reward: 65.22
Episode: 1400, e_greed: 0.42925800000189274
[DQN Agent] : mean_score: 145.36, mean_reward: 70.54
[Random Agent] : mean_score: 148.64, mean_reward: 66.72
Episode: 1600, e_greed: 0.41988700000214346
[DQN Agent] : mean_score: 193.4, mean_reward: 101.98
[Random Agent] : mean_score: 161.54, mean_reward: 77.1
Episode: 1800, e_greed: 0.41034600000239874
[DQN Agent] : mean_score: 201.82, mean_reward: 107.8
[Random Agent] : mean_score: 165.48, mean_reward: 81.4
Episode: 2000, e_greed: 0.40094500000265026
[DQN Agent] : mean_score: 194.7, mean_reward: 100.16
[Random Agent] : mean_score: 152.68, mean_reward: 68.44
6.6 展示训练历史¶
plt.figure(figsize=(10, 5))
plt.plot(x_history, [score for (score, _) in history1], label="DQN score")
plt.plot(x_history, [reward for (_, reward) in history1], label="DQN reward")
plt.plot(x_history, [score for (score, _) in history2], label="Random score")
plt.plot(x_history, [reward for (_, reward) in history2], label="Random reward")
plt.xlabel("episode")
plt.ylabel("score/reward")
plt.title("DQN Agent VS Random Agent")
plt.legend()
plt.show()
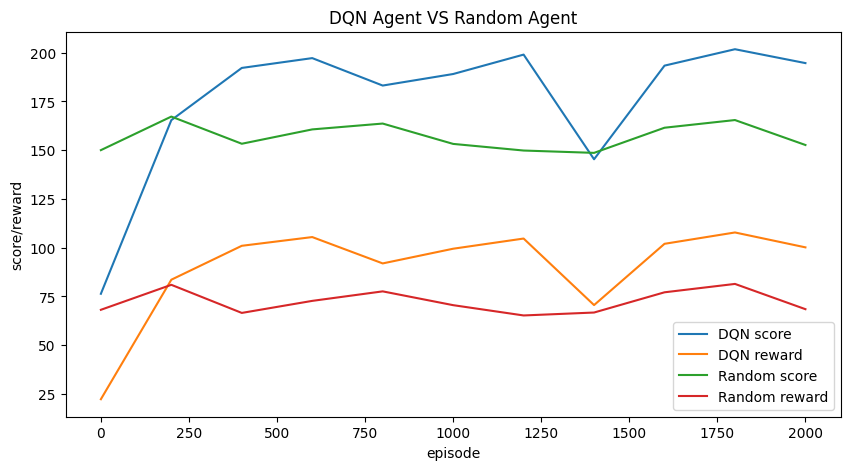
其中,可以看出,DQN 智能体在 400 轮后(奖励 $reward$)优于随机智能体,因此可以认为该模型学习到了游戏特点。
在 1400 局时的评估中,$score_{DQN} < score_{Random}$,即模型尚有部分情况处理能力较差。
但由于 $score$ 和 $reward$ 存在差异,在 200 轮后,有 $reward_{DQN} > score_{Random}$。
由于奖励 $reward$ 与分数 $score$ 相关,因此两曲线正相关。
6.7 保存模型参数¶
paddle.save(agent.policy_net.state_dict(), FINAL_PARAM_PATH)
七、可视化与模型评估¶
7.1 特征可视化¶
通过直观观察特征,进一步理解特征对智能体决策的作用。
7.1.1 特征可视化函数¶
def visualize_feature(
feature: np.ndarray, game_resolution: typing.Tuple[int, int]
) -> np.ndarray:
game_w, game_h = game_resolution
feature_img = np.zeros((game_h, game_w * 2, 3), dtype=np.uint8) # 初始化特征图
uw, uh = game_w / feature.shape[1], game_h / feature.shape[0] # 网格宽高
_v2c = (
lambda v: 255 if v > 0 else (0 if v == 0 else int(-v / 13.0 * 255.0))
) # 特征值转颜色(单通道)
value2color = (
lambda v: (_v2c(v), _v2c(v), _v2c(v)) if v >= 0 else (127, _v2c(v), _v2c(v))
) # 特征值转颜色(三通道)
for i in range(feature.shape[0]):
for j in range(feature.shape[1]):
# 对特征的每个值,基于值对应的颜色来渲染相应的网格
feature_img[
int(i * uh) : int((i + 1) * uh), int(j * uw) : int((j + 1) * uw)
] = value2color(feature[i, j, 0])
feature_img[
int(i * uh) : int((i + 1) * uh),
int(j * uw + game_w) : int((j + 1) * uw + game_w),
] = value2color(feature[i, j, 1])
# 绘制特征值文本到对应网格中
putText2(
feature_img,
f"{int(feature[i, j, 0])}",
(int((j + 0.5) * uw), int((i + 0.5) * uh)),
font_scale=0.3,
color=(0, 0, 255),
)
putText2(
feature_img,
f"{int(feature[i, j, 1])}",
(int((j + 0.5) * uw + game_w), int((i + 0.5) * uh)),
font_scale=0.3,
color=(0, 0, 255),
)
# 绘制网格线(横向)
for i in range(feature.shape[0]):
cv2.line(
feature_img, (0, int(i * uh)), (game_w * 2, int(i * uh)), (255, 0, 0), 1
)
# 绘制最下面的网格线
cv2.line(feature_img, (0, game_h - 1), (game_w * 2, game_h - 1), (255, 0, 0), 1)
# 绘制左半部分网格线(纵向)
for j in range(feature.shape[1]):
cv2.line(feature_img, (int(j * uw), 0), (int(j * uw), game_h), (0, 255, 0), 1)
# 绘制左半部分的右边界线
cv2.line(feature_img, (game_w - 1, 0), (game_w - 1, game_h), (0, 255, 0), 1)
# 绘制右半部分网格线(纵向)
for j in range(feature.shape[1]):
cv2.line(
feature_img,
(int(j * uw + game_w), 0),
(int(j * uw + game_w), game_h),
(0, 255, 0),
1,
)
# 绘制右边界线
cv2.line(
feature_img,
(game_w - 1 + game_w, 0),
(game_w - 1 + game_w, game_h),
(0, 255, 0),
1,
)
# 绘制两部分中间的分隔线(较粗)
cv2.line(feature_img, (game_w, 0), (game_w, game_h), (255, 255, 0), 3)
return feature_img
7.1.2 特征可视化¶
首先开始一局游戏并进行一些操作。
# 初始化环境
env.reset(11235813)
max_steps = 30
# 预设动作
actions = [(i % GameInterface.ACTION_NUM) for i in range(max_steps)]
feature, _, alive = env.next(0)
rewards_sum = 0
step = 0
while alive and step < max_steps:
action = actions[step]
feature, reward, alive = env.next(action)
step += 1
# 渲染游戏画面
env.game.draw()
print(f"score: {env.game.score}, alive: {env.game.alive}")
score: 69, alive: True
随后分别显示游戏画面与特征可视化的结果。
plt.figure(figsize=(12, 8), dpi=600, layout="tight")
fig, (ax1, ax2) = plt.subplots(1, 2, gridspec_kw={"width_ratios": [1, 2]})
ax1.set_title("Game Screen")
ax1.axis("off")
rgb_img = cv2.cvtColor(env.game.screen, cv2.COLOR_BGRA2BGR)
# 左侧显示游戏界面
ax1.imshow(rgb_img[:, :, ::-1])
ax2.set_title("Feature")
ax2.axis("off")
rgb_img = visualize_feature(
env.game.get_features(
GameInterface.FEATURE_MAP_WIDTH, GameInterface.FEATURE_MAP_HEIGHT
),
env.game.resolution,
)
# 右侧显示特征图
ax2.imshow(rgb_img[:, :, ::-1])
plt.show()
<Figure size 7200x4800 with 0 Axes>
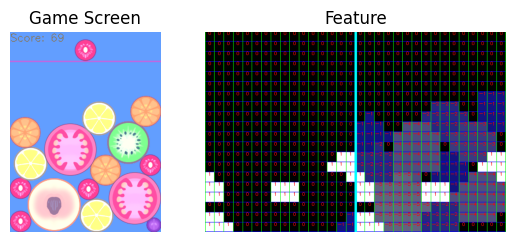
特征图中,分为左右两部分,使用白色表示和当前水果同类的区域,数值为 1。
左侧用于记录比当前水果小的水果,右侧记录比当前水果大的水果,不满足条件且不为同类的水果在所属特征图中不可见。
以上图为例,当前水果为红色的樱桃,类别为 2。
因此特征图中(左右部分分别)有四个区域为白色,对应左图中的四颗樱桃 2。
左部记录比当前水果小的:当前图中仅葡萄 1(在最右下角)比樱桃 2 小,因此其余部分均为黑色 0 (空白)。
右部记录比当前水果大的:当前图中大多数水果均大于樱桃 2,差距越大的水果颜色越浅,可以看到特征图的右部和游戏界面整体表现一致。
7.2 评估训练结果¶
基于给定的 env 和 agent,进行一定数量局数的游戏。
在游戏结束后,返回每局的平均得分和平均总奖励。
# 评估 200 局,降低偶然性影响
EVALUATE_TIMES = 200
random_agent = RandomAgent(GameInterface.ACTION_NUM)
scores1, rewards1 = [], []
scores2, rewards2 = [], []
for _ in range(EVALUATE_TIMES):
seed = evaluate_random.random()
score1, reward1 = evaluate(env, agent, seed)
scores1.append(score1)
rewards1.append(reward1)
score2, reward2 = evaluate(env, random_agent, seed)
scores2.append(score2)
rewards2.append(reward2)
print(
f"""[DQN Agent]\t:\tmean_score: {np.mean(scores1)},\tmean_reward: {np.mean(rewards1)},
\t\t\tmax_score: {np.max(scores1)},\tmax_reward: {np.max(rewards1)},
\t\t\tmin_score: {np.min(scores1)},\tmin_reward: {np.min(rewards1)}"""
)
print(
f"""[Random Agent]\t:\tmean_score: {np.mean(scores2)},\tmean_reward: {np.mean(rewards2)},
\t\t\tmax_score: {np.max(scores2)},\tmax_reward: {np.max(rewards2)},
\t\t\tmin_score: {np.min(scores2)},\tmin_reward: {np.min(rewards2)}"""
)
[DQN Agent] : mean_score: 205.01, mean_reward: 109.82,
max_score: 352, max_reward: 222,
min_score: 90, min_reward: 16
[Random Agent] : mean_score: 153.215, mean_reward: 69.67,
max_score: 322, max_reward: 194,
min_score: 57, min_reward: -16
可以看到,DQN 智能体分数显著优于随机智能体的分数,因此认为该网络能学习到游戏策略。