
API 介绍 - IO¶
介绍目前 Kernel Primitive API 提供的用于全局内存和寄存器进行数据交换的 API。当前实现的 IO 类 API 均是 Block 级别的多线程 API,函数内部以 blockDim.x 或 blockDim.y 进行线程索引。
ReadData¶
函数定义¶
template <typename Tx, typename Ty, int NX, int NY, int BlockSize, bool IsBoundary = false>
__device__ void ReadData(Ty* dst, const Tx* src, int size_nx, int size_ny, int stride_nx, int stride_ny);
函数说明¶
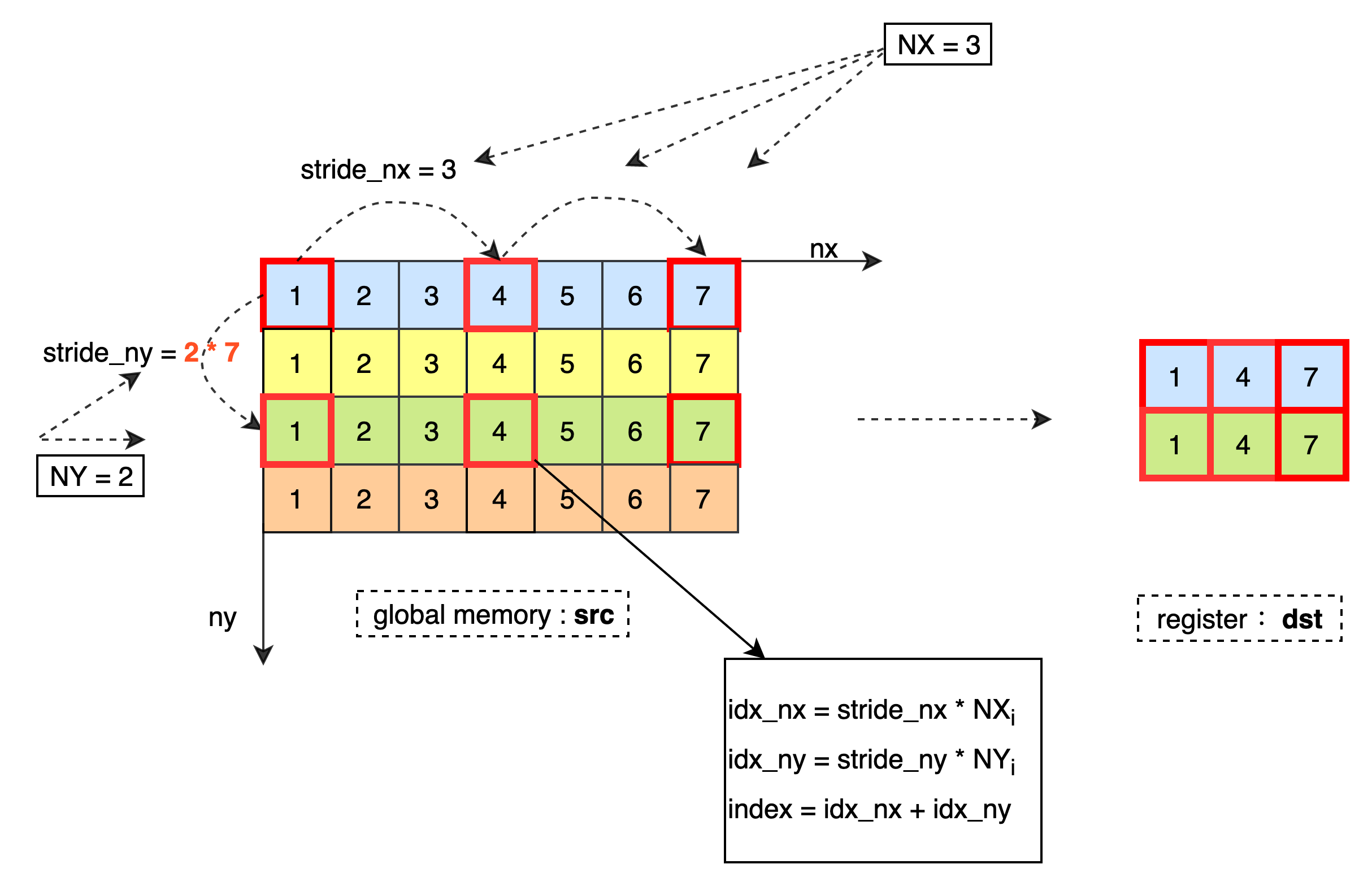
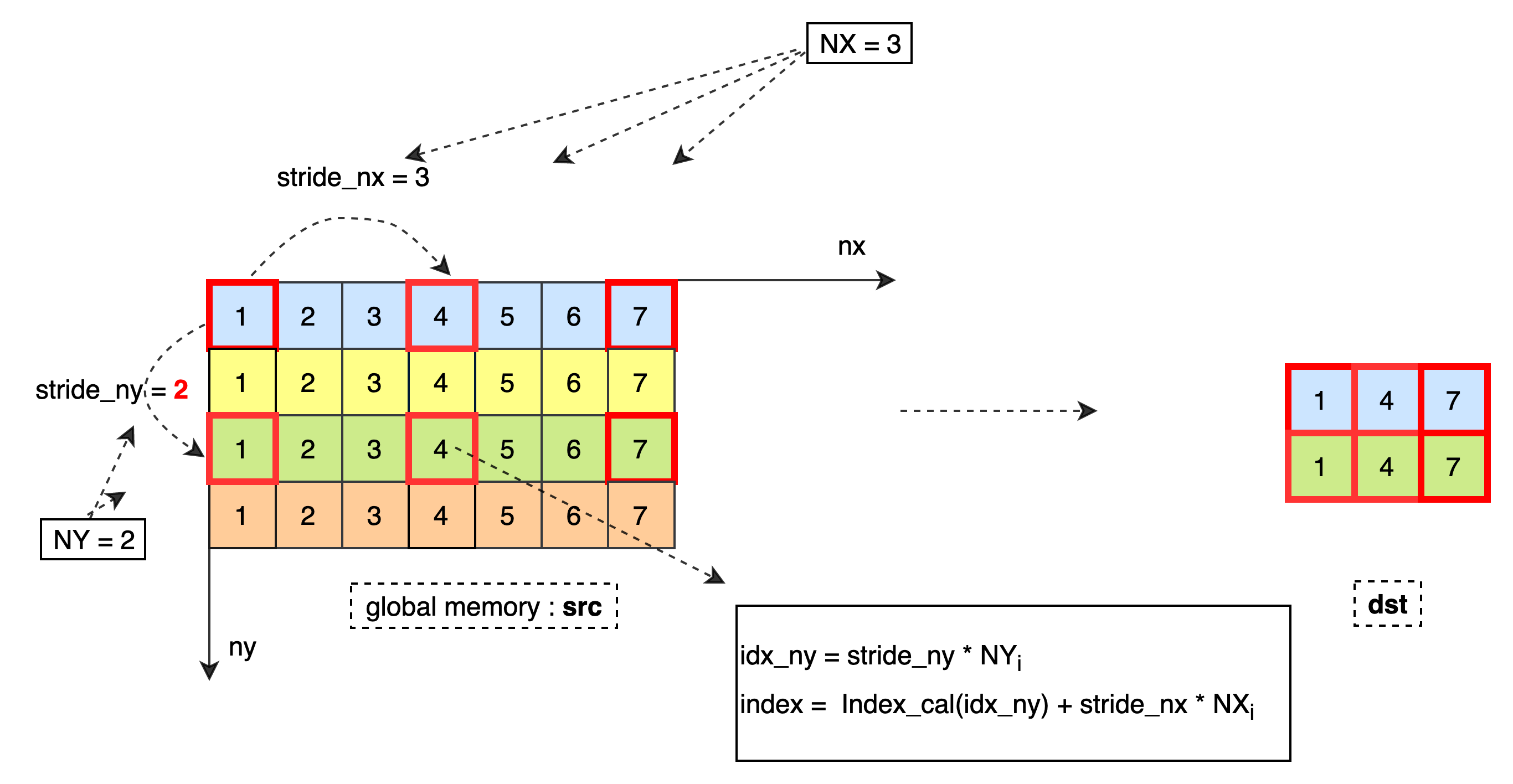
将 Tx 类型的 2D 数据从全局内存中读取到寄存器,并按照 Ty 类型存储到寄存器 dst 中。最低维每读取 1 个元素需要偏移 stride_nx 个元素,最高维每读取 1 个元素需要偏移 stride_ny 个元素,直到加载 NX * NY 个数据到寄存器 dst 中。当 IsBoundary = true 需要保证当前最高维偏移个数不超过 size_ny,列偏移个数不超过 size_nx。
数据处理过程如下:
模板参数¶
Tx :数据存储在全局内存中的数据类型。
Ty :数据存储到寄存器上的类型。
NX :每个线程读取 NX 列数据。
NY :每个线程读取 NY 行数据。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst :输出寄存器指针,数据类型为 Ty,大小为 NX * NY。
src :当前 Block 的输入数据指针,数据类型为 Tx。
size_nx :当前 Block 在最低维最多偏移 size_nx 个元素,参数仅在 IsBoundary = true 时参与计算。
size_ny :当前 Block 在最低维最多偏移 size_ny 个元素,参数仅在 IsBoundary = true 时参与计算。
stride_nx :最低维每读取 1 个元素需要跳转 stride_nx 个元素。
stride_ny :最高维每读取 1 个元素需要跳转 stride_ny 个元素。
ReadData¶
函数定义¶
template <typename T, int NX, int NY, int BlockSize, bool IsBoundary = false>
__device__ void ReadData(T* dst, const T* src, int num);
函数说明¶
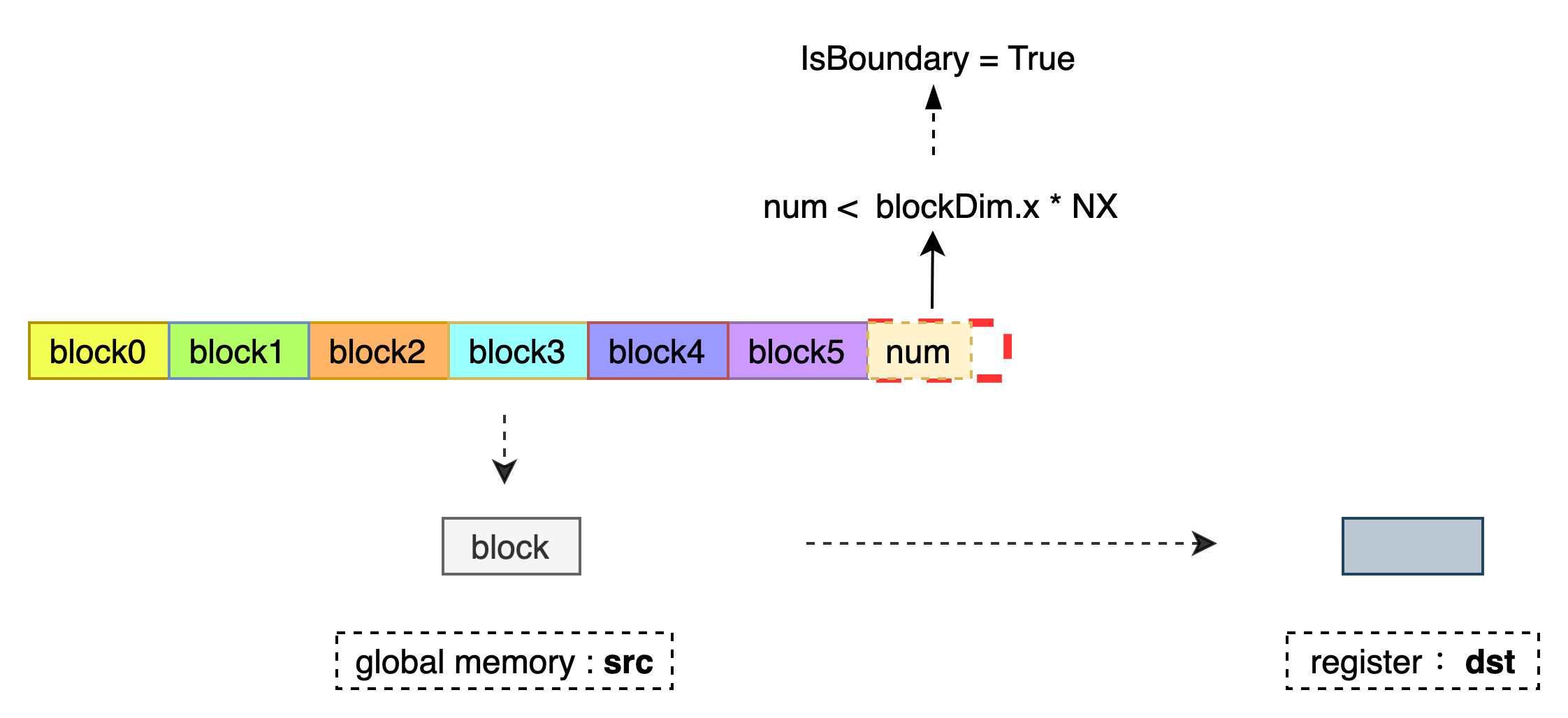
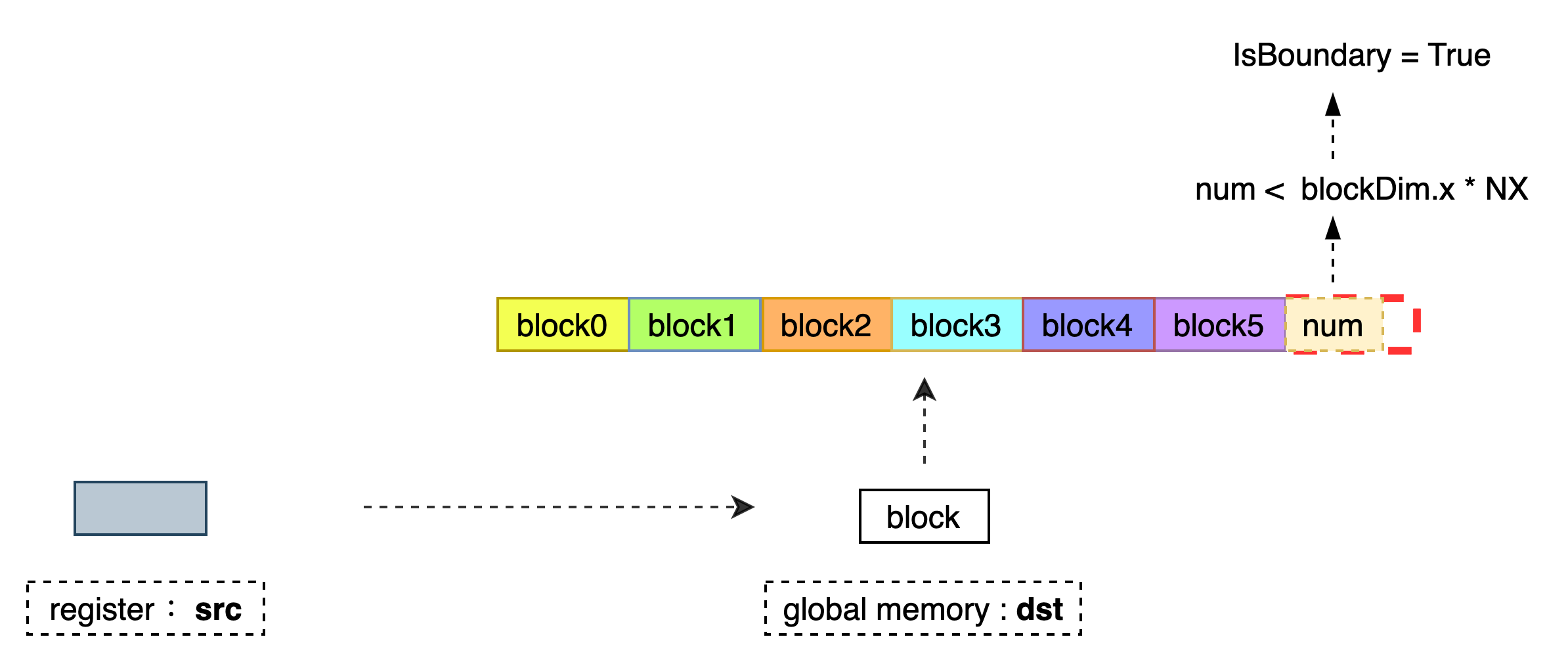
将 T 类型的 1D 数据从全局内存 src 中读取到寄存器 dst 中。每次连续读取 NX 个数据,当前仅支持 NY = 1,直到加载 NX 个数据到寄存器 dst 中。当 IsBoundary = true 需要保证 Block 读取的总数据个数不超过 num,以避免访存越界。当 (NX % 4 = 0 或 NX % 2 = 0) 且 IsBoundary = false 时,会有更高的访存效率。
数据处理过程如下:
模板参数¶
T :元素类型。
NX :每个线程连续读取 NX 列数据。
NY :每个线程读取 NY 行数据,当前仅支持为 NY = 1。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst ;输出寄存器指针,大小为 NX * NY。
src ;当前 Block 的输入数据指针。
num ;当前 Block 最多读取 num 个元素,参数仅在 IsBoundary = true 时使用。
ReadDataBc¶
函数定义¶
template <typename T, int NX, int NY, int BlockSize, int Rank, bool IsBoundary = false>
__device__ void ReadDataBc(T* dst, const T* src,
uint32_t block_offset,
details::BroadcastConfig<Rank> config,
int total_num_output,
int stride_nx,
int stride_ny);
函数说明¶
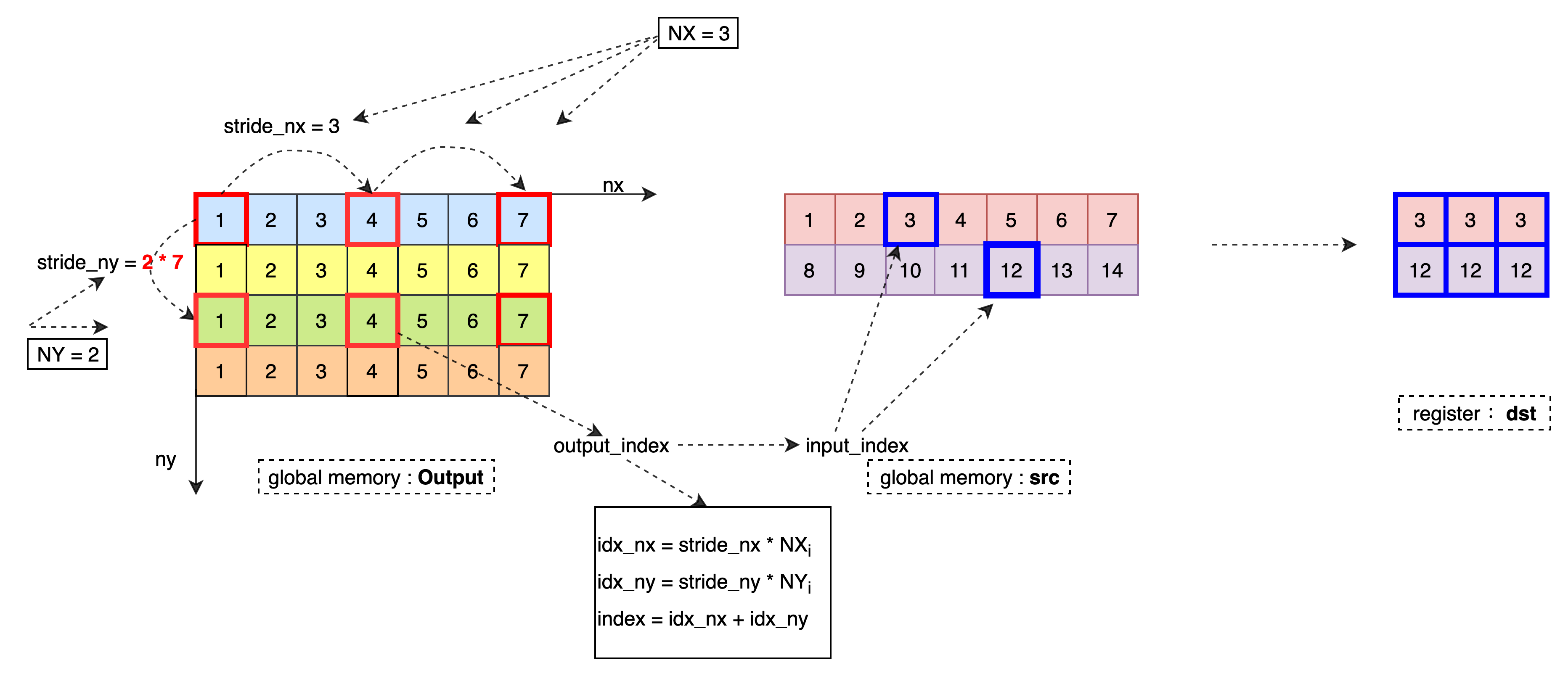
将需要进行 brodcast 的 2D 数据按照 T 类型从全局内存 src 中读取到寄存器 dst 中,其中 src 为原始输入数据指针,根据 config 计算当前输出数据对应的输入数据坐标,并将坐标对应的数据读取到寄存器中。
数据处理过程如下:
模板参数¶
T :元素类型。
NX :每个线程读取 NX 列数据。
NY :每个线程读取 NY 行数据。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
Rank :原始输出数据的维度。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst :输出寄存器指针,大小为 NX * NY。
src :原始输入数据指针。
block_offset :当前 Block 的数据偏移。
config :输入输出坐标映射函数,可通过 BroadcastConfig(const std::vector<int64_t>& out_dims, const std::vector<int64_t>& in_dims, int dim_size) 进行定义。
total_num_output :原始输出的总数据个数,避免访存越界,参数仅在 IsBoundary = true 时参与计算。
stride_nx :最低维每读取 1 个元素需要跳转 stride_nx 个元素。
stride_ny :最高维每读取 1 个元素需要跳转 stride_ny 个元素。
ReadDataBc¶
函数定义¶
template <typename T, int NX, int NY, int BlockSize, int Rank, bool IsBoundary = false>
__device__ void ReadDataBc(T* dst, const T* src,
uint32_t block_offset,
details::BroadcastConfig<Rank> config,
int total_num_output);
函数说明¶
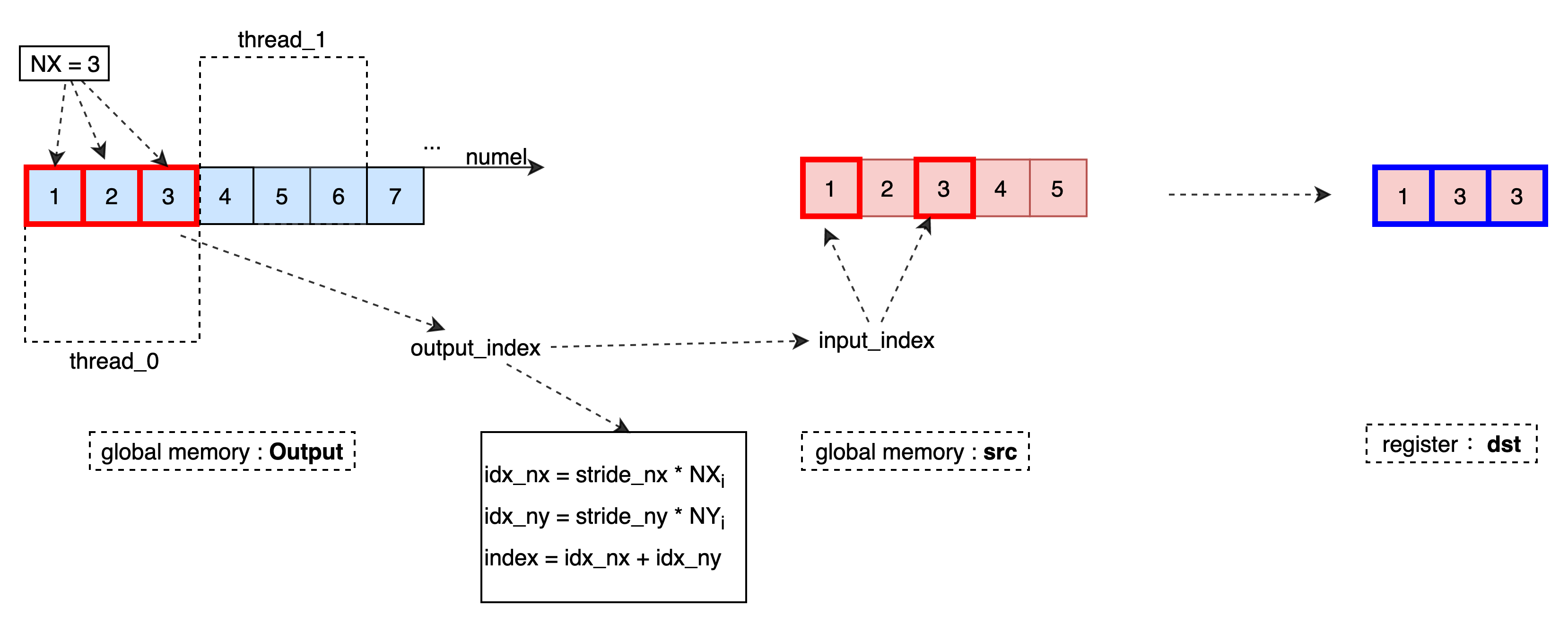
将需要进行 brodcast 的 1D 数据按照 T 类型从全局内存 src 中读取到寄存器 dst 中,其中 src 为原始输入数据指针,根据 config 计算当前输出数据对应的输入数据坐标,并将坐标对应的数据读取到寄存器中。
数据处理过程如下:
模板参数¶
T :元素类型。
NX :每个线程连续读取 NX 列数据。
NY :每个线程读取 NY 行数据。当前仅支持 NY = 1
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
Rank :原始输出数据的维度。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst :输出寄存器指针,大小为 NX * NY。
src :原始输入数据指针。
block_offset :当前 Block 的数据偏移。
config :输入输出坐标映射函数,可通过 BroadcastConfig(const std::vector<int64_t>& out_dims, const std::vector<int64_t>& in_dims, int dim_size) 进行定义。
total_num_output :原始输出的总数据个数,避免访存越界,参数仅在 IsBoundary = true 时使用。
ReadDataReduce¶
函数定义¶
template <typename Tx, typename Ty, int NX, int NY, int BlockSize, int Rank, typename IndexCal, typename Functor, bool IsBoundary = false>
__device__ void ReadDataReduce(Tx* dst,
const Ty* src,
int block_offset,
const IndexCal& index_cal,
int size_nx,
int size_ny,
int stride_nx,
int stride_ny,
Functor func,
bool reduce_last_dim);
函数说明¶
根据 index_cal 计算当前输出数据对应的输入数据坐标,将坐标对应的数据从全局内存 src 中读取到寄存器 dst 中。根据是否需要进行规约操作将数据映射成 2D 数据,总是将最后一维所在的维度映射到线程变化最快的维度,保证数据访存效率最高。
数据处理过程如下:
模板参数¶
Ty :数据存储在全局内存中的数据类型。
Tx :数据存储到寄存器上的类型。
NX :每个线程读取 NX 列数据。
NY :每个线程读取 NY 行数据。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
Rank :原始输出数据的维度。
IndexCal :输入输出坐标映射规则。定义方式如下:
struct IndexCal {
__device__ inline int operator()(int index) const {
return ...
}
};
Functor :输入元素在存储到寄存器前做的数据变换,如:dst[i] = SquareFunctor(src[i])。 IsBoundary ;标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst :输出寄存器指针,大小为 NX * NY。
src :原始输入数据指针。
block_offset ;当前 Block 的数据偏移。
config ;输入输出坐标映射函数,可以定义为 IndexCal()。
size_nx :当前 Block 最多读取 size_nx 个不需要进行规约的数据,参数仅在 IsBoundary = true 时参与计算。
size_ny :当前 Block 最多读取 size_ny 个需要进行规约的数据,参数仅在 IsBoundary = true 时参与计算。
stride_nx :最低维每读取 1 个元素需要跳转 stride_nx 列。
stride_ny :最高维每读取 1 个元素需要跳转 stride_ny 行。
func : 输入数据存储到寄存器前做的数据变换,如:dst[i] = SquareFunctor(src[i])。 reduce_last_dim:原始输入数据的最低维是否进行 reduce,当 reduce_last_dim = true 按照 threadIdx.x 进行索引,否则使用 threadIdx.y。
WriteData¶
函数定义¶
template <typename T, int NX, int NY, int BlockSize, bool IsBoundary = false>
__device__ void WriteData(T* dst, T* src, int num);
函数说明¶
将 T 类型的 1D 数据从寄存器 src 写到全局内存 dst 中。每次连续读取 NX 个数据,当前仅支持 NY = 1,直到写 NX 个数据到全局内存 dst 中。当 IsBoundary = true 需要保证当前 Block 向全局内从中写的总数据个数不超过 num,以避免访存越界。当 (NX % 4 = 0 或 NX % 2 = 0) 且 IsBoundary = false 时,会有更高的访存效率。
数据处理过程如下:
模板参数¶
T :元素类型。
NX :每个线程连续读取 NX 列数据。
NY :每个线程读取 NY 行数据,当前仅支持为 NY = 1。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst ;当前 Block 的输出数据指针。
src ;寄存器指针,大小为 NX * NY。
num ;当前 Block 最多读取 num 个元素,参数仅在 IsBoundary = true 时使用。
WriteData¶
函数定义¶
template <typename Tx, typename Ty, int NX, int NY, int BlockSize, bool IsBoundary = false>
__device__ void WriteData(Ty* dst, const Tx* src, int size_nx, int size_ny, int stride_nx, int stride_ny);
函数说明¶
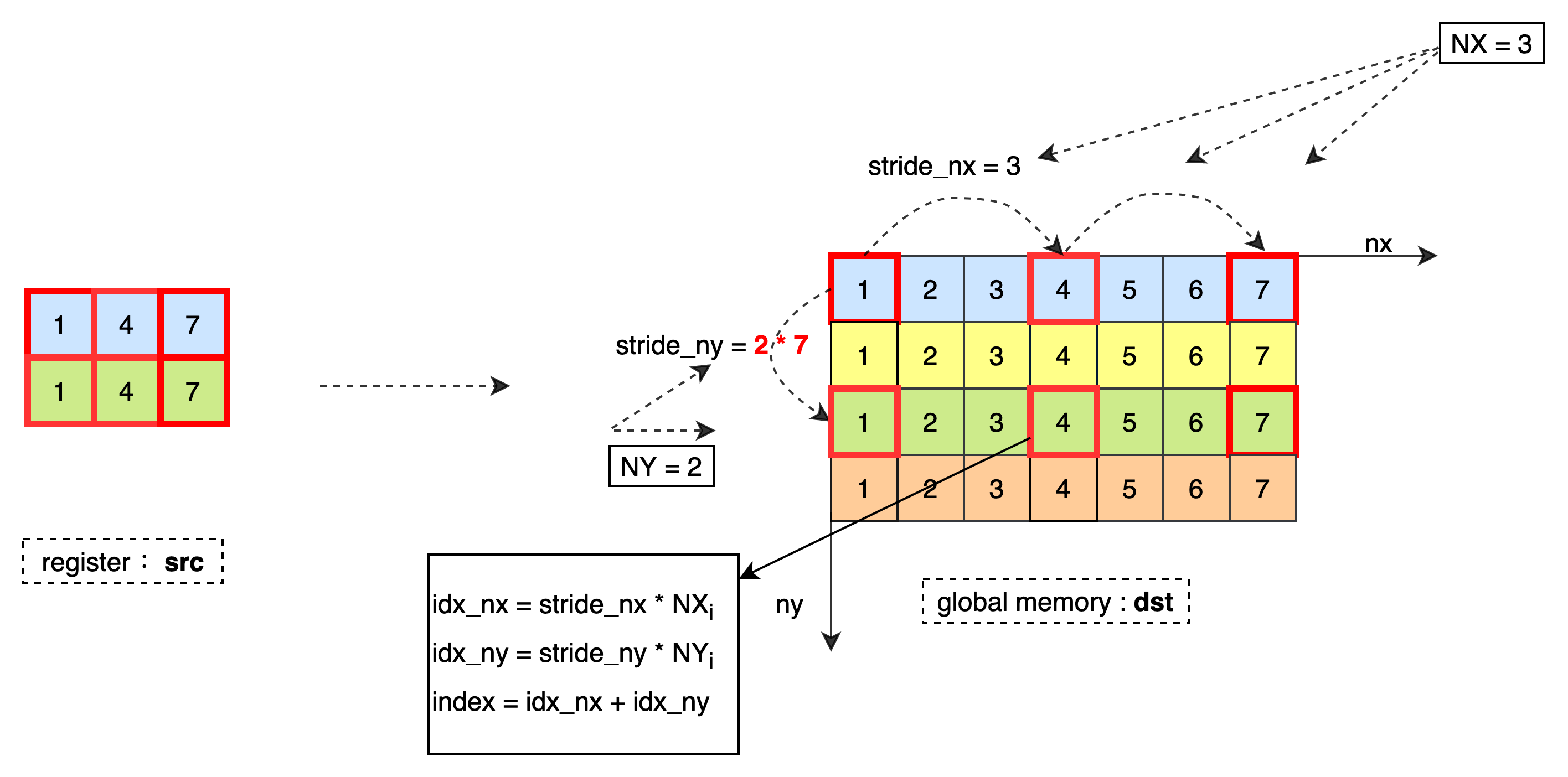
将 Tx 类型的 2D 数据从寄存器中写入到全局内存,并按照 Ty 类型存储到全局内存 dst 中。最低维每写入 1 个元素需要偏移 stride_nx 个元素,最高维每写入 1 个元素需要偏移 stride_ny 个元素,直到将寄存器 NX * NY 个数据全部写入到全局内存 dst 中。当 IsBoundary = true 需要保证当前最高维偏移个数不超过 size_ny,列偏移个数不超过 size_nx。
数据处理过程如下:
模板参数¶
Ty :数据存储在全局内存中的数据类型。
Tx :数据存储到寄存器上的类型。
NX :每个线程读取 NX 列数据。
NY :每个线程读取 NY 行数据。
BlockSize :设备属性,标识当前设备线程索引方式。对于 GPU,threadIdx.x 用作线程索引,当前该参数暂不支持。
IsBoundary :标识是否进行访存边界判断。当 Block 处理的数据总数小于 NX * NY * blockDim.x 时,需要进行边界判断以避免访存越界。
函数参数¶
dst :当前 Block 的输出数据指针。
src :寄存器指针,数据类型为 Tx。
size_nx :Block 最多偏移 size_nx 个元素,参数仅在 IsBoundary = true 时参与计算。
size_ny :Block 最多偏移 size_ny 个元素,参数仅在 IsBoundary = true 时参与计算。
stride_nx :最低维每读取 1 个元素需要跳转 stride_nx 个元素。
stride_ny :最高维每读取 1 个元素需要跳转 stride_ny 个元素。
Init¶
函数定义¶
template <typename T, int NX>
__device__ void Init(T* dst, T init_data);
函数说明¶
将寄存器 dst 中的所有元素初始化为 init_data。
模板参数¶
T :元素类型。
NX :初始化 NX 个元素。
函数参数¶
dst ;寄存器指针。
init_data ;初始值。
Init¶
函数定义¶
template <typename T, int NX, int IsBoundary = false>
__device__ void Init(T* dst, T* src, int num);
函数说明¶
使用 src 寄存器中的元素对 dst 中的 NX 个元素进行初始化,当 IsBoundary = true 时,初始化个数不超过 num。
模板参数¶
T :元素类型。
NX :初始化 NX 个元素。
IsBoundary :是否为初始化边界, 当 NX > num 时, IsBoundary = true。
函数参数¶
dst ;输出寄存器指针。
src ;输入寄存器指针。
num ;初始化的个数。