案例简介
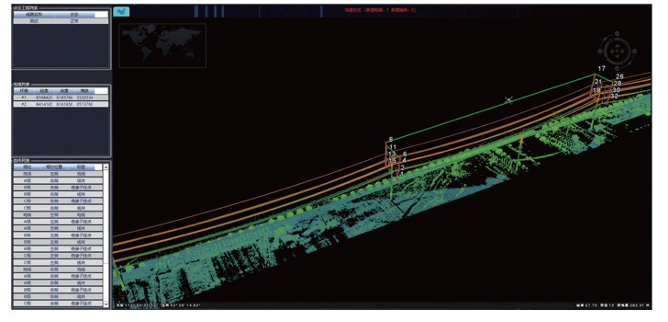
能源、交通等基础设施较多的行业都存在设施老化、安全隐患、高危巡检作业的需求。目前无人机在电力线路巡检 作业中已经广泛应用,逐渐由人工巡检转变为无人机巡检,更进一步的发展为基于航线规划的无人机自主巡检,在 实际作业中逐步推广。无人机自主飞行主要基于事先建立的三维点云,进行航线规划,根据规划航线自主飞行。
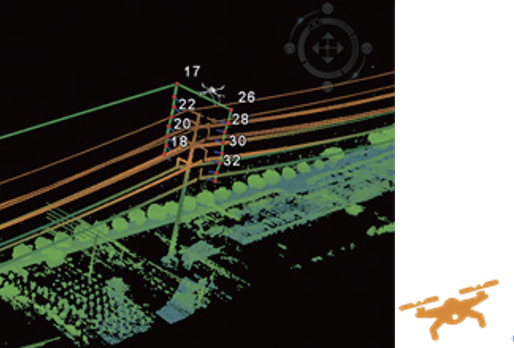
无人机巡检示意图
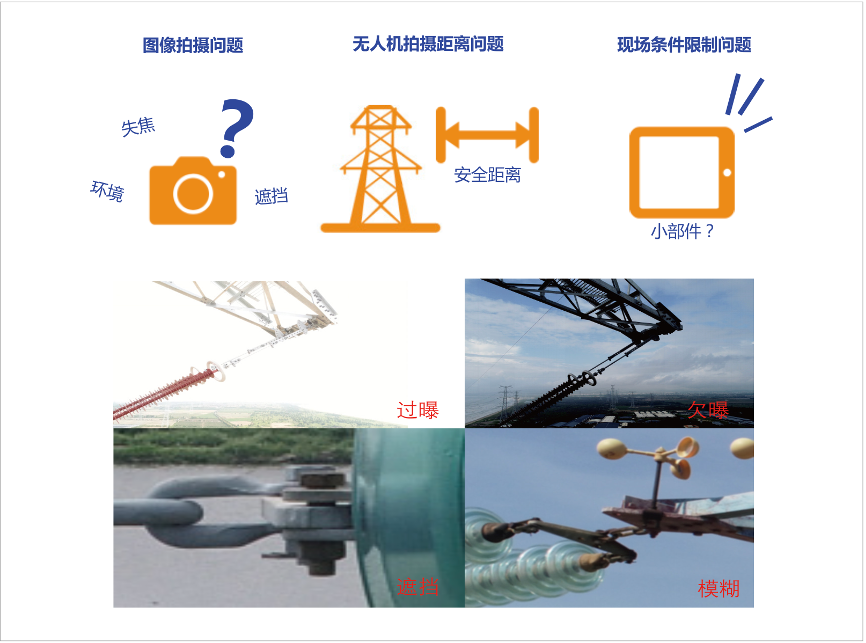
北京御航智能科技有限公司采用飞桨深度学习开源平台中的 Paddle Lite 针对自主飞行采集拍照过程中遇到的拍照 模糊等问题,在边缘侧基于巡检无人机采集的图片进行处理,实现边缘侧的杆塔部件、线路风险的实时识别。
相关产品
Paddle Lite
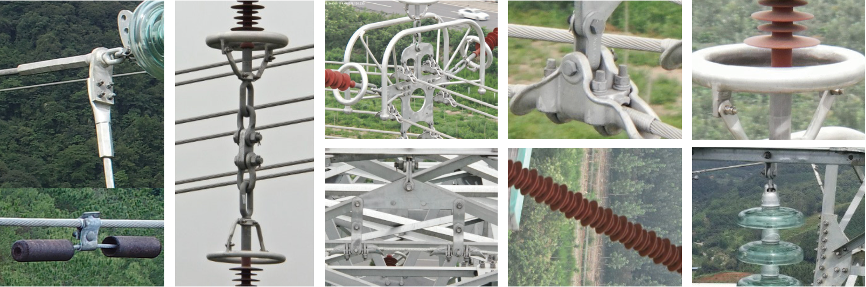
场景分析
业务挑战
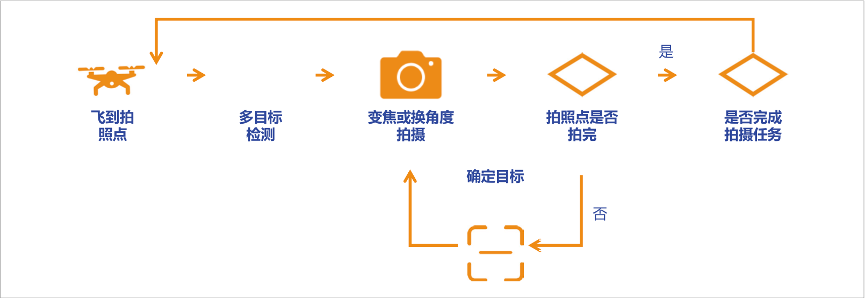
解决思路
自动飞到指定位置:基于机巡系统的杆塔位置数据,自动规划巡线路线,无人机自动飞到指定位置,减少人工干预。
利用无人机自身 OSDK 接口的开发,可以控制云台进行多角度拍照,提供更多的缺陷识别素材。
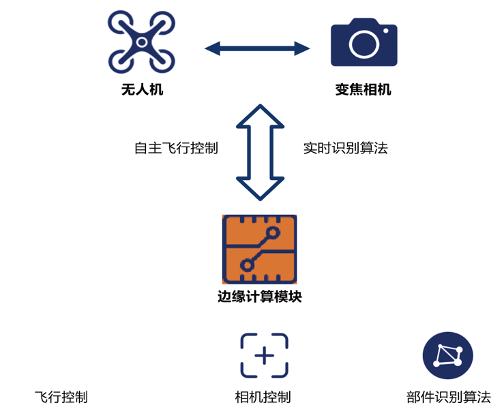
技术方案
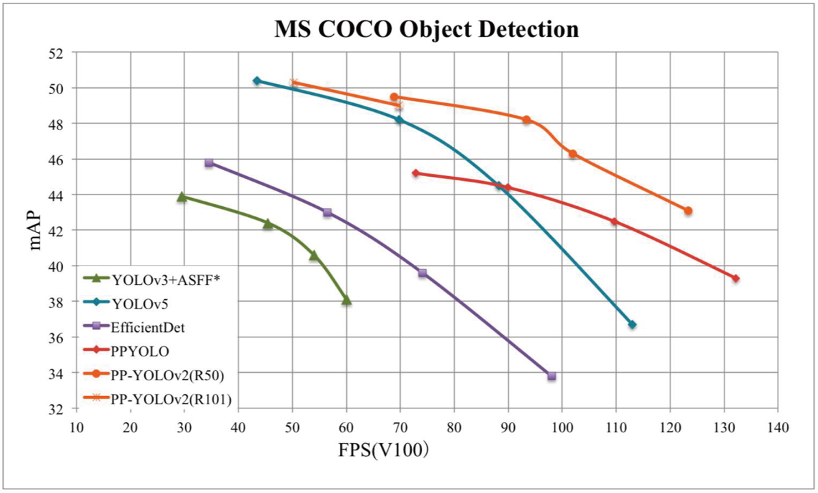
实时识别算法 PP-YOLOv2
一种可以在实际应用场景中直接应用的具有相对平衡的有效性和效率的目标检测器。
比常用算法更快,比YOLOv5更准
目标检测示例
上线效果
案例企业简介
北京御航智能科技有限公司(Beijing Imperial Image Intelligent Technology Co.,LTD),创立于2018年,专 注于空天智能图像处理技术和产品研发,其使命是引领人工智能技术快速赋能于电力巡检、油气管线巡检、遥感信息应用等领域。公司核心产品主要有电力巡检图像智能识别平台系统、巡检边缘计算系统、巡检可视化装备及 AI 中台系统等,可为无人机在电力巡线、风电场巡检、油气管线巡检等领域提供巡检智能化、数据中台化综合应用解决方案。
案例简介
能源、交通等基础设施较多的行业都存在设施老化、安全隐患、高危巡检作业的需求。目前无人机在电力线路巡检 作业中已经广泛应用,逐渐由人工巡检转变为无人机巡检,更进一步的发展为基于航线规划的无人机自主巡检,在 实际作业中逐步推广。无人机自主飞行主要基于事先建立的三维点云,进行航线规划,根据规划航线自主飞行。
无人机巡检示意图
北京御航智能科技有限公司采用飞桨深度学习开源平台中的 Paddle Lite 针对自主飞行采集拍照过程中遇到的拍照 模糊等问题,在边缘侧基于巡检无人机采集的图片进行处理,实现边缘侧的杆塔部件、线路风险的实时识别。
相关产品
Paddle Lite
场景分析
业务挑战
解决思路
自动飞到指定位置:基于机巡系统的杆塔位置数据,自动规划巡线路线,无人机自动飞到指定位置,减少人工干预。
利用无人机自身 OSDK 接口的开发,可以控制云台进行多角度拍照,提供更多的缺陷识别素材。
技术方案
实时识别算法 PP-YOLOv2
一种可以在实际应用场景中直接应用的具有相对平衡的有效性和效率的目标检测器。
比常用算法更快,比YOLOv5更准
目标检测示例
上线效果
案例企业简介
北京御航智能科技有限公司(Beijing Imperial Image Intelligent Technology Co.,LTD),创立于2018年,专 注于空天智能图像处理技术和产品研发,其使命是引领人工智能技术快速赋能于电力巡检、油气管线巡检、遥感信息应用等领域。公司核心产品主要有电力巡检图像智能识别平台系统、巡检边缘计算系统、巡检可视化装备及 AI 中台系统等,可为无人机在电力巡线、风电场巡检、油气管线巡检等领域提供巡检智能化、数据中台化综合应用解决方案。